


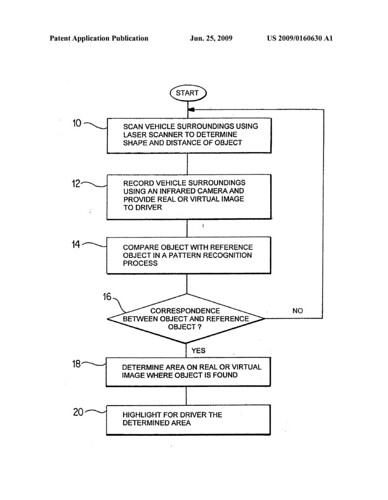
At least one laser scanner provided in the vehicle scans the surroundings in front of the vehicle and determines the shape of an object and the distance of the object from the vehicle. At least one infrared camera, in particular a thermal imaging camera, is provided on the vehicle. The infrared camera records the surroundings in front of the vehicle and makes available the real or virtual image of the surroundings for display to the driver. The object is compared with at least a first reference object within the scope of a first pattern recognition process. If there is significant correspondence between the object and the reference object, that area on the real or virtual image displayed to the driver in which the object is to be found is determined, and the respective area of the image and/or the respective object is highlighted in the image.
Looks like we are very quickly approaching the point where driving a car will become more like piloting an F16. Below is an image from the patent application showing how the system will work.
No comments:
Post a Comment